Introduction
This is a primer project which covers following concepts-
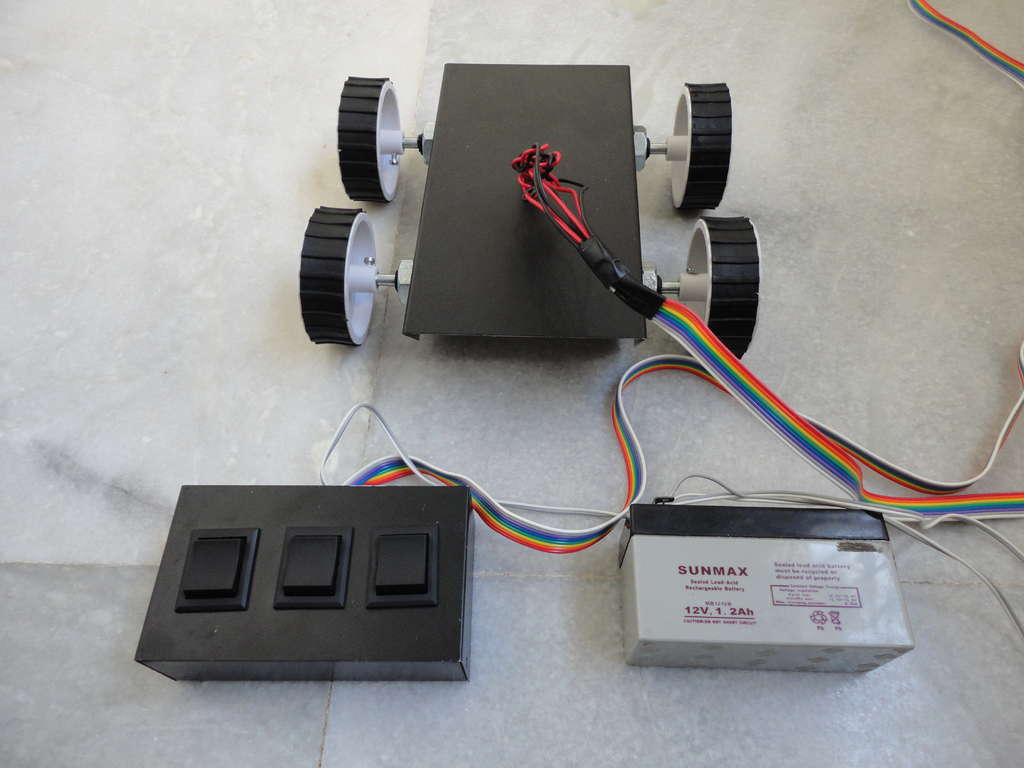
1.Power Supply (Adapter or Rectifier)or 12v battery
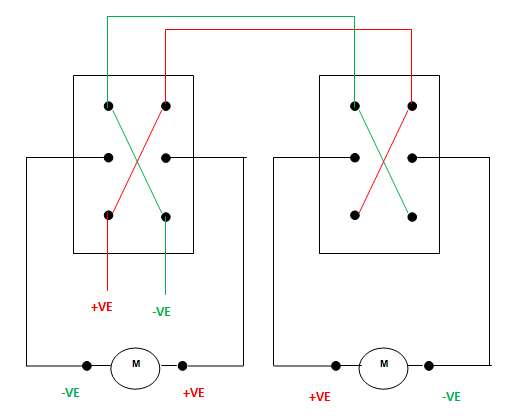
2.Three way switch operation.
3.DC Geared Motors
4.Basic motion of Robot
Components Required
- Soldering Iron
- Soldering Wire
- Wire Stripper
- Single strand wires
- Multi strand wire of appropriate length
- PCB (dot)(optional if using adapter)
- 4 Diodes (D1N4007)(optional if using adapter)
- 1 Electrolytic Capacitor (1000 microfarad)
- Step down Transformer (220v- 12V AC)
- Two 3 way switches or Two 2 way switches and two push button switches.
- 2 plastic boxes to encase transformer and for control box
- Plug for transformer(optional if using adapter)
- 2 pin, 4 pin relimates
- Insulation Tape
- IC 7805(optional if using adapter)
- DC motors
- Breadboard (optional)
- Multimeter
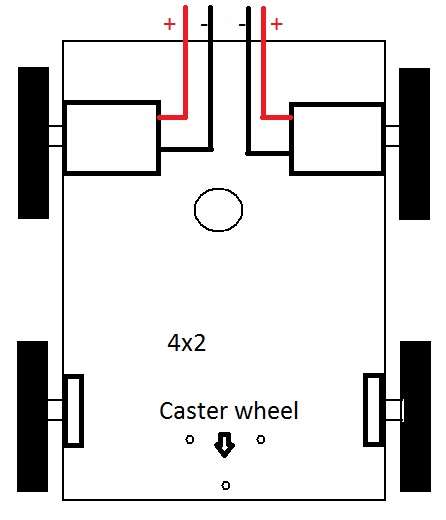
Chassis
Chassis is a mechanical assembly for making a 4 wheel drive platform.Where you can mount any controller board to drive your bot. This is just the mechanical chassis, Optionally as shown in the figure you can use 4 DC geared motors, 1 castor and 4 wheels with rubber rings so you can make both variants .
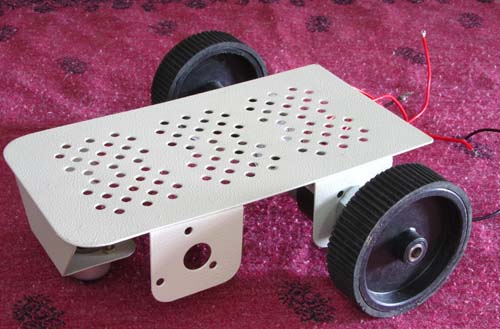
Mechanical Assembly

Fit the caster wheel at position show in above diagram with 1.5-2 inches (approx.) screw. Fit the dc motor into the holes of chassis and couple the wheel by using screw or rubber tube.
Three way Switch Circuit

Motor Connections
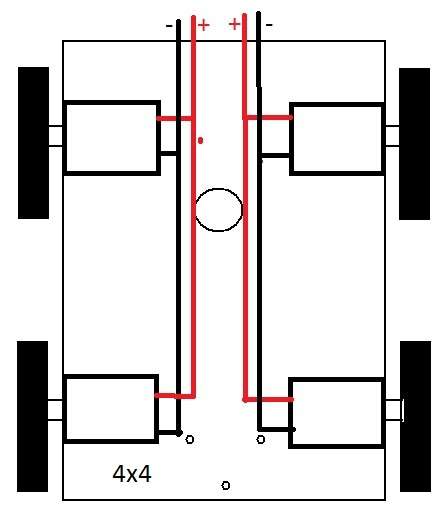
The motors are fixed to the chassis and the tyres are fitted to the DC Geared Motors