Tutorials
Mecanum Wheel
The Mecanum wheel is one design for a wheel which can move in any direction. It is sometimes called the ilon wheel after its Swedish inventor, Bengt Ilon, who came up with the idea in 1973 Mecanum Wheel when he was an engineer with the Swedish company Mecanum AB.
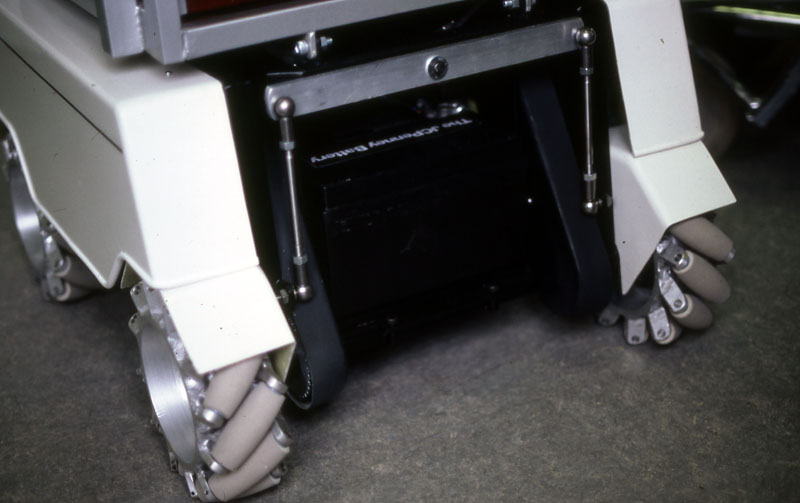
It is a conventional wheel with a series of rollers attached to its circumference. These rollers have an axis of rotation at 45° to the plane of the wheel in a plane parallel to the axis of rotation of the wheel. By alternating wheels with left and right-handed rollers, so that each wheel applies force roughly at right angles to the diagonal the wheel is on, the vehicle is stable and can be made to move in any direction and turn by varying the speed and direction of rotation of each wheel. Moving all four wheels in the same direction causes forward or backward movement, running the wheels on one side in the opposite direction to those on the other side causes rotation of the vehicle, and running the wheels on one diagonal in the opposite direction to those on the other diagonal causes sideways movement. Combinations of these motions allow for motion in any direction with any rotation.
Tracked vehicles and skid steer vehicles utilize the same methods for turning. However, these vehicles typically drag across the ground while turning and may do considerable damage to a soft or fragile surface. The high friction against the ground while turning also requires high torque engines to overcome the friction. By comparison, the design of the Mecanum wheel allows for in-place rotation with minimal ground friction and low torque.

This video shows the working of Mecanum Wheels:
http://www.youtube.com/watch?v=o-j9TReI1aQ
Mecanum Wheels in action:
http://www.youtube.com/watch?v=S9t68QzUVNA&feature=related
Galileo Wheel
Galileo developed a mobility platform that combines a wheel and track in one, initially they were used only for heavy agricultural activities and military use. But with development of robotics they play an important role in robotics too. Enabling wheelchairs that climb, robots that traverse mountainous and rough surfaces and more. An order of magnitude improvement over state of art technology installed on any machine in our case robots with no modifications to the machine drastically lower ground damage and at the same time enhancing the performance of the machine while traversing rough surfaces. Even while traversing a
comparatively smooth surface Galileo wheels provide stability to the vehicle.

This video shows the real-time use of Galileo Wheels :
http://www.youtube.com/watch?v=6JrUV2_ML4M&feature=relmfu
Omni Wheel
Omni wheels or poly wheels, similar to Mecanum wheels, are wheels with small discs around the circumference which are perpendicular to the rolling direction. The effect is that the wheel will roll with full force, but will also slide laterally with great ease. These wheels are often employed in holonomic drive systems.

A platform employing three omni wheels in a triangular configuration is generally called Kiwi Drive/Omni Drive. They are often used in small robots. In leagues such as Robocup, many robots use these wheels to have the ability to move in all directions. Omni wheels are also sometimes employed as powered casters for differential drive robots to make turning faster. However, this design is not commonly used as it leads to fishtailing.
Omni-wheels combined with conventional wheels provide interesting performance properties, such as on a six wheel vehicle employing two conventional wheels on a center axle and four omni-wheels on front and rear axles.

Understanding Omni Wheels:
https://www.youtube.com/watch?v=moDlZ7-QxpY
Omni-Wheels In action:
http://www.youtube.com/watch?v=QB15-uSNvHA&feature=related