Introduction
Set in a modified version of the middle earth world, hobbit Frodo Baggins and the Fellowship embark on a quest to destroy not one but multiple Rings, to ensure the destruction of the Dark Lord Sauron. Help Frodo navigate through the path of the green rings in order to destroy them and counter the obstacles present to deviate them from their path so as to win the War of the Rings by weakening Sauron’s forces.
USP
-
Colour Detection
-
Obstacle Avoidance
-
Pattern Detection
-
Onboard Camera
Problem Statement
To build a robot that uses an onboard camera to detect a path formed by circles and traverses on it autonomously and is capable of shape detection and barcode reading.
Rules
General Rules:
-
The maximum number of participants allowed per team: 4 people
-
The participants will be provided with 220 Volts, 50 Hz standard AC supply.
-
Participants will have to arrange for themselves if they require any other power supply for their robot.
-
On board processing units, if any, should fit within the dimensional constraints specified. Processing outside the arena is recommended, either wired or wireless.
-
Teams qualifying the first round will go into the second round.
-
Teams cannot tinker with their robots inside the arena.
-
USB extenders (5m long) will be provided.
-
The decision of Team Robotix will be final and binding.
-
If we suspect hard coding, we reserve the full right to check the participant’s robot by testing on random arenas and code submission.
-
For solving the PS no other sensor apart from a monocular camera is allowed.
-
Only one onboard camera can be used. Participants are not allowed to use any other camera elsewhere or multiple cameras onboard.
-
Any team displaying aggressive behaviour or refusing to comply with Team Robotix judgement will be immediately disqualified.
-
Wilful damage of the arena may lead to disqualification and a fine.
Event Rules:
-
Maximum Restarts:
-
Round 1: 1
-
Round 2: 1
-
-
Maximum Timeouts:
-
Round 1: 2
-
Round 2: 2
-
Maximum duration of a timeout is 2 mins only.
-
-
Restarts will be given only for technical fault in the robot
-
Thresholding time of 20 minutes will be given in each round before the run starts.
-
The participants should use a separate LED for blinking.
Robot Specifications:
-
The robot must fit in a box of 20cm x 20cm x 20cm with a tolerance of 10% in the dimensions of the robot. No part/mechanism of/on the robot should exceed the given dimensions before the commencement of the event. However, the dimensions can change during the course of the run.
-
Dimensions of the arena are to be considered with a maximum tolerance of 10%.
-
Onboard camera for the runs will be provided by TEAM Robotix. The model of the webcam used is : https://www.logitech.com/en-us/product/hd-pro-webcam-c920s
Task
The Barcode
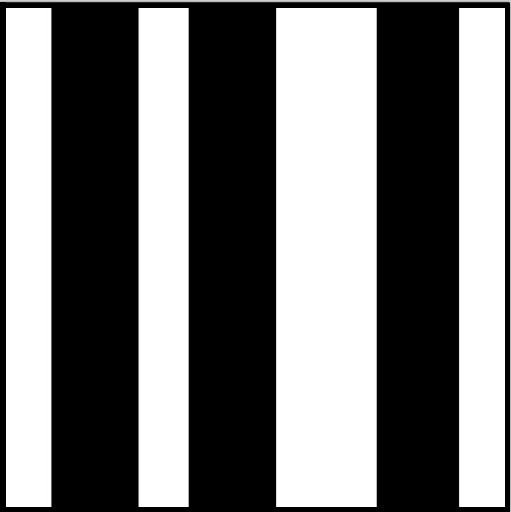
-
The barcode consists of 4 white strips which are either thin (10mm wide) or thick (20 mm wide) separated by black tape.
-
Reading from left to right, each white strip corresponds to 1-bit which is either a 0 or 1. A thick strip corresponds to a 1 and a thin strip corresponds to a 0. The total width of the barcode is always 100mm. Further, the barcode is surrounded by a 1cm thick black boundary around it.
-
The barcode can represent binary numbers from 0000 to 1111 (which correspond to 0-15 in decimal number system).
Round 1
-
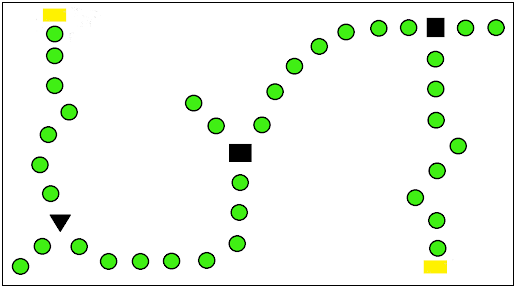
The arena consists of 2-D green circles and 2D non-green triangles and quadrilaterals. The circle will approximately be of a 7cm diameter with an approximately equal 15cm distance between the centres of consecutive circles.
-
The robot has to move from the start point to the endpoint moving along the circles. It has to move through each circle without straying from the path. The path is defined by always following the next closest circle.
-
The path branches after each 2D obstacle which can be either a triangle or a quadrilateral based on which, the bot has to decide which direction to proceed in- right or left. The directions can be different for different runs..
-
For example, if it’s a triangle, the bot has to proceed towards the left and towards right if it’s a quadrilateral. It also has to blink an LED once if it’s a triangle and twice if it’s a quadrilateral obstacle.
Round 2
-
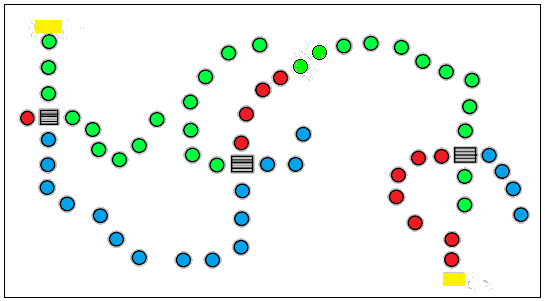
In the second round, the distance between the circles will vary and not remain uniform. Further, obstacles, which will only be quadrilaterals, will contain a barcode that the bot has to read.
-
The paths branching from each of these obstacles will be of different colors. Depending on the information scanned, if the path to be followed is green, the bot has to blink an LED once, twice if it is blue and thrice if it is red. The number of times corresponding to a colour may change for different runs.
-
Then it has to scan the paths and has to either turn right, left or keep moving forward. For example:
No. on node Path to be chosen
0,3,6,9,12,15 Green path
1,4,7,10,13 Red path
2,5,8,11,14 Blue path
-
However, colour of path to be chosen may change for different runs.
-
The last node will be a plain black square. Taking the average of the numbers scanned so far, it has to either turn right, left or move forward.
Average Turn
0-5 Forward
6-10 Right
11-15 Left
Arena
Round 1
Round 2
Scoring
Round 1
-
Moving to the next closest circle: Landing on the circle: +20 points
-
Detecting the shape of the obstacle: +100 points
-
Correct path identification after obstacle encounter: +100 points
-
Time Bonus : +300 - Time taken(in s)
-
Not moving to the next closest circle: -10 points
-
Incorrect shape detection of obstacle: -50 points
-
Incorrect turn after obstacle encounter: -100 points
-
Slipping out of the line (based on Team Robotix discretion): -50 points
-
Restart: -100 points
-
Timeout: -50 points
Round 2
-
Moving to the next closest circle: Landing on the circle: +20 points
-
Correctly choosing the path after barcode reading: +200 points
-
Time Bonus : +300 - Time taken(in s)
-
Correct identification of path color after reading the barcode: +100 points
-
Correct turn identification after yellow node : +150 points
-
Not moving to the next closest circle: -10 points
-
Incorrect turn after obstacle encounter: -100 points
-
Incorrect turn after yellow node: -100 points
-
Slipping out of the line (based on Team Robotix discretion): -50 points
-
Restart: -100 points
-
Timeout: -50 points
Example Scoring
Case 1: (Round 1) Robot correctly traverses all circles, making correct turns at the obstacles.
Let’s say there are 30 circles in the shortest path and 3 obstacles (triangle or rectangle). The bot lands on each circle and correctly identifies the correct shapes and paths with 30 seconds left, the corresponding scoring will be:
-
+30 x 20 = 600 points for landing on each circle.
-
+3 x 100 = 300 points for correctly identifying shape by blinking LED.
-
+3 x 100 = 300 points for choosing the correct path.
-
+(300-270) = 30 points as time bonus
Hence, the final tally will be 1230 points.
Case 2: (Round 1) The robot lands on 20 circles, making correct turns at 1 of the 3 obstacles, correctly identifying the shapes at 2 of the 3 obstacles and slips out of path one time. Let’s say that 15 of the 20 circles are the next closest ones in the path and there is exactly no time left.
-
+15 x 20 = 300 points for landing on each circle.
-
-5 x 10 = -50 points for correctly identifying shape by blinking LED.
-
+1 x 100 = 100 points for choosing the correct path.
-
-2 x 100 = -200 points for choosing the incorrect paths.
-
+2 x 100 = 200 points for correctly identifying the shapes by blinking LED.
-
-1 x 50 = -50 points for incorrectly identifying one of the shapes.
-
-1 x 50 = -50 points for slipping out of the line.
-
+(300-300) = 0 points as time bonus
Hence, the final tally will be 300 points.
Case 3: (Round 2) The robot lands on 25 circles, making correct turns at 3 of the 3 barcodes, correctly identifying the path colour at 2 of the 3 barcodes. The robot also makes the correct turn at the final node.
Let’s say that 23 of the 25 circles are the next closest ones in the path and 20 seconds more than permitted.
-
+23 x 20 = 460 points for landing on each circle.
-
-2 x 10 = -20 points for correctly identifying shape by blinking LED.
-
+3 x 200 = 600 points for choosing the correct path.
-
+2 x 100 = 200 points for correctly identifying the path colours by blinking LED.
-
-1 x 50 = -50 points for incorrect path colour detection.
-
+1 x 50 = 150 points for correct turn at final node.
-
+(300-320) = -20 points as time bonus
Hence, the final tally will be 1320 points
Contacts
Shivangi Srivastava
Email: myspace.shivangi@gmail.com
Ph. no: +91 9475853503
Mohit Singh
Email: mohitsiitkgp17@gmail.com
Ph. no: +91 7728991073
Tanya Sneh
Email: tanyasneh@gmail.com
Ph. no: +91 8942053975