Introduction:
The Mission to colonize mars was well underway, but when those elected to save humanity touched down on the Red Planet is when disaster struck. Technical malfunction caused one of the fuel tanks to explode, creating a ton of debris and cracks in the oxygen tanks. With the precious gas leaking out into the thin Martian atmosphere, it’s upto the braniacs on board to devise a plan to get to the tanks and shut the tank valve before they find themselves suffocating. Put yourself in their shoes as you seek to build a robot that can find its way through debris, climbing over obstacles, and pick and place blocks to create a way and clear the area, ultimately releasing the spherical key to shut the valve!
Problem Statement
To build a manually controlled robot that can lift itself up vertically, initiate and continue translation on an elevated surface and also pick and place objects.
USP
-
Mechanism to switch surface plane of movement
-
Picking and placing objects at variable distances from the bot
Rules and Specifications
General Rules
-
All arena dimensions may have a tolerance (error) of up to 10%.
-
Each team can consist of a maximum of 4 members.
-
Only 2 members per team will be allowed to control the robot.
-
The participants will be provided with 220 volts, 50 Hz standard AC supply. However, the participants cannot use this voltage apart from getting at max 24V DC output through an adapter. This goes to say that no component on the robot may use a power supply higher than 24V DC. In case of any discrepancy, Team ROBOTIX will have the final say.
-
Skipping any part of the arena will be the participants choice and will be done only on the participant’s request and the approval of Team ROBOTIX. Any discrepancies will be handled by Team ROBOTIX and their decision will be final and binding. The timer will not stop when the position of the robot is being changed by the participant, but the initial and final position will be decided by Team ROBOTIX.Also, if the participants choose to skip any part of the arena, no time bonus will be given to the team even if they complete the run before the timer runs out.
-
The team members can be from different institutes or colleges.
-
Teams qualifying the first round will go into the second round.
-
The teams cannot touch their robot during the course of the run, unless timeout is taken.
-
The best spirit of sportsmanship is expected from the participants.
-
The decision of Team ROBOTIX will be final and binding.
Arena and Locomotion
-
The robot has to start from the start point (green colored area), which will be marked in the arena.
-
The robot has to go and complete the tasks as specified above. Any discrepancies will be handled by Team ROBOTIX and their decision will be final and binding.
-
Time will be kept by Team ROBOTIX and their decision will be final and binding.
Initial Orientation of Robot
-
The participant is allowed to decide the initial orientation of his robot in the start zone.
-
Team ROBOTIX reserves the right to disallow any initial orientation of the robot inside the starting zone if it gives the participant an undue advantage, solely based on the judge’s discretion.
Restarts and Timeouts
-
A maximum of 2 Timeouts of 1 minute each may be taken in each round. Penalty will be awarded for each timeout and robot will start from its last position on the arena.
-
The participant’s robots can have a maximum of 1 restart per round. A penalty will be imposed on the team for every restart that they take.
-
After the restart, the participant’s robot will be set to its initial position. Timer will be set to zero and the run will start afresh with the addition of the penalty for restart.
-
A timeout can be taken anytime at the participant’s discretion.
-
A restart can only be taken if there is a genuine technical fault in the robot. Team ROBOTIX may refuse a restart if the reason is not genuine enough, and their decision will be binding and final.
Robot Specifications
-
Each robot can have a maximum dimension of 30 x 30 x 40 cubic cm (L x B x H) respectively in its most concise form, with an allowance of an extra 5%.
-
No part/mechanism of/on the robot should exceed the given dimensions before the commencement of the event run. The robots can exceed their respective dimensions once the event commences. However, Team ROBOTIX gets the final say in deciding whether the advantage is fair or not.
-
There is no weight restriction on the robot.
-
LEGO kits or its spare parts or pre-made mechanical parts are not allowed.
-
Ready-made gearboxes, sensors, development boards can be used but no other part of the robot should contain any ready-made components. Simple car bases with no extra features may be used.
-
The bots should not damage the event arena in any way. If it does so, a penalty will be imposed on the team. The magnitude of the penalty will be decided by Team ROBOTIX.
Task
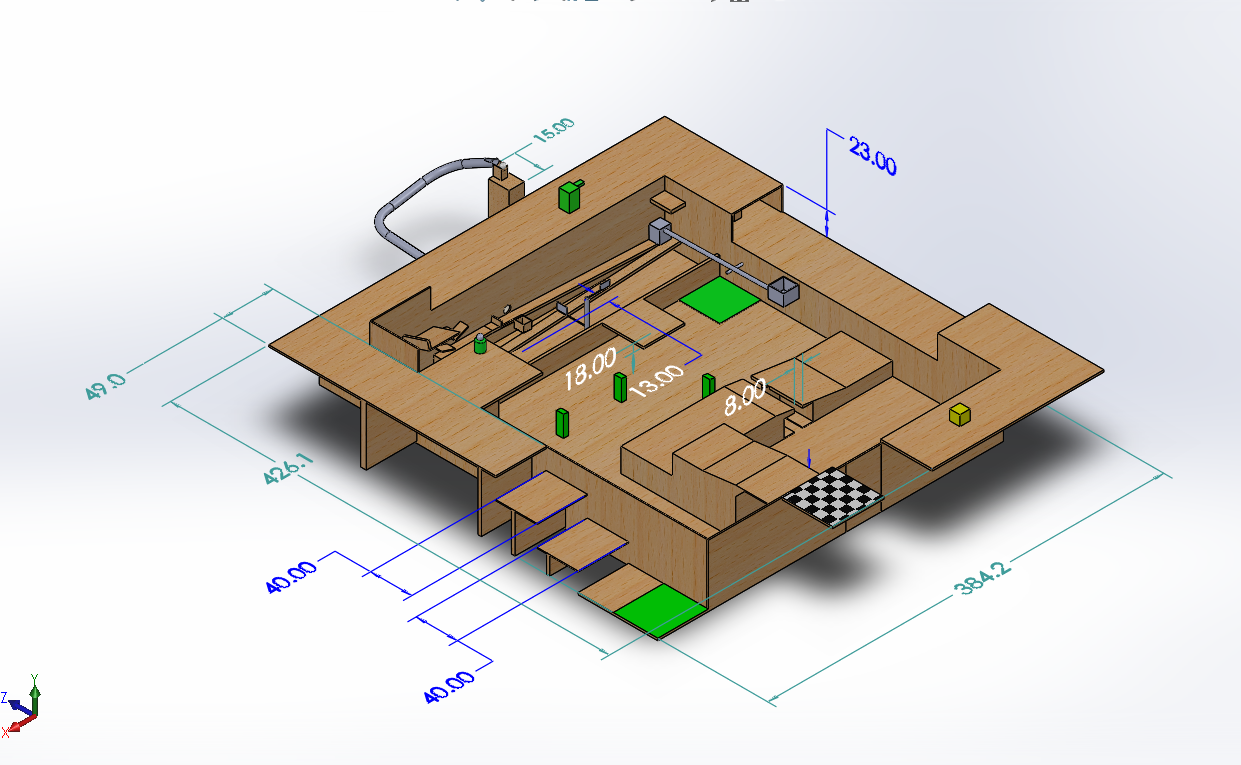
Arena (Isometric View)
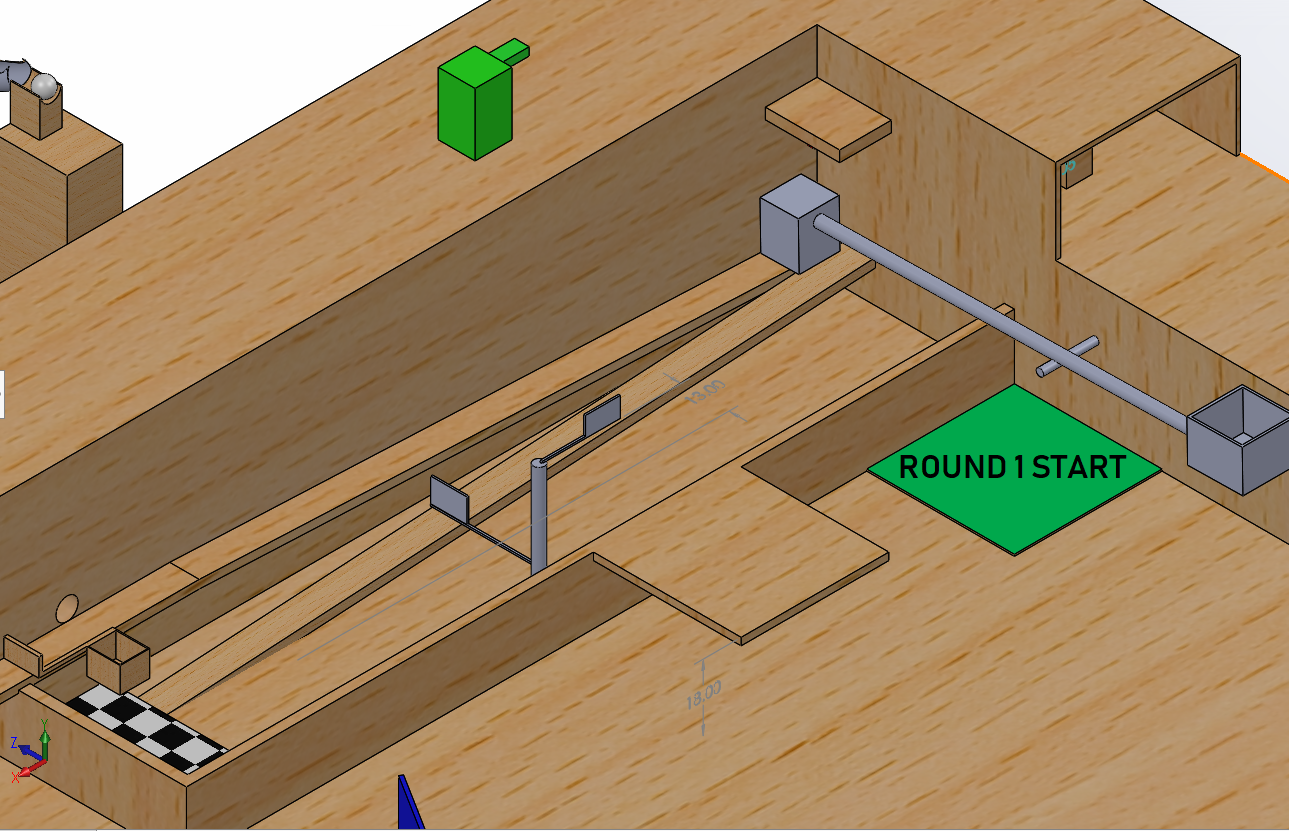
Round 1
-
The time limit for this round is 5 minutes.
-
The bot has to start from the starting area (green colored square in the diagram).
-
The bot has to climb the stage near it and rotate the flagpole-shaped obstacle (using its extendable gripper) obstructing the path of a ball to clear the path–ramp sloping downwards, currently obstructed by the flag supported by the flagpole obstacle. The cleared path will allow for the motion of a white ball in round 2.
-
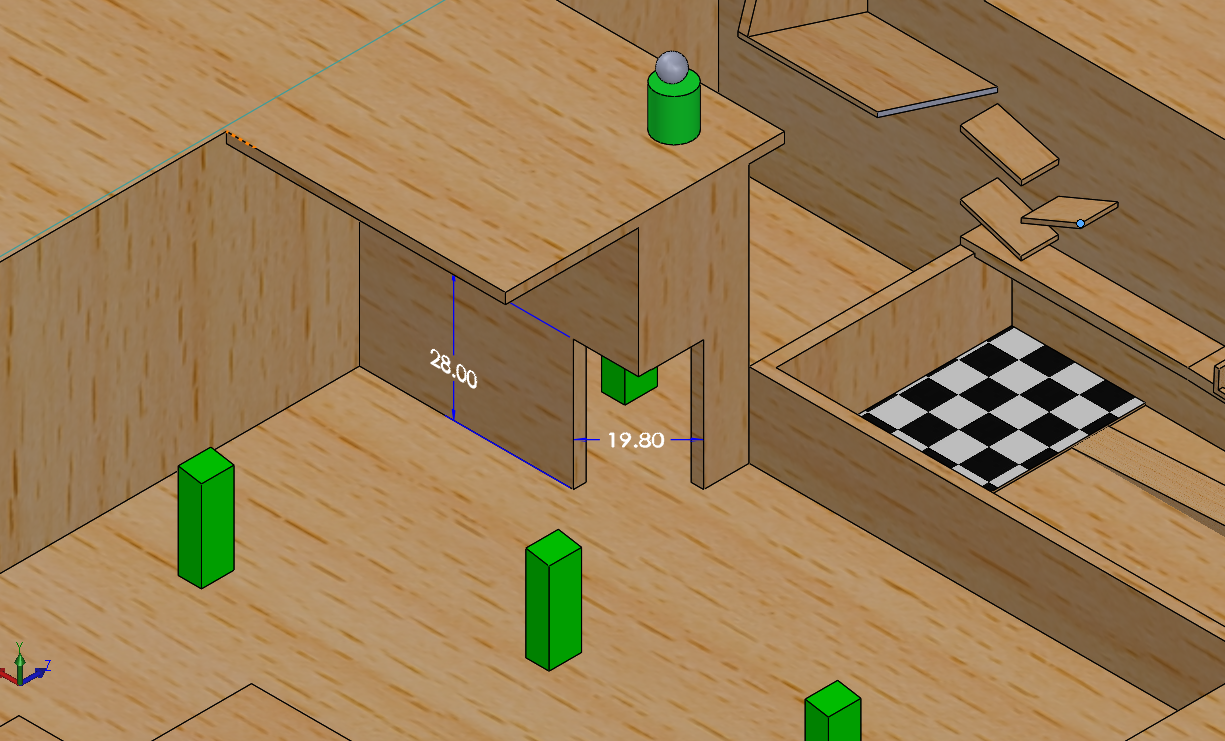
The bot has to climb down into the pit, pick up green blocks near it in the pit using its gripper mechanism, which will be used to fill up the gap just after the ramp that it has to climb thereafter.
-
After all the green blocks are out in the pit and the gap is filled adequately, the bot has to climb the first stage and traverse the filled gap to reach the upcoming stage.
-
In this way, the bot has to come out of the pit using the stages provided to it.
-
Thus, the First Round will end when the bot reaches the checked surface which is right outside the pit.
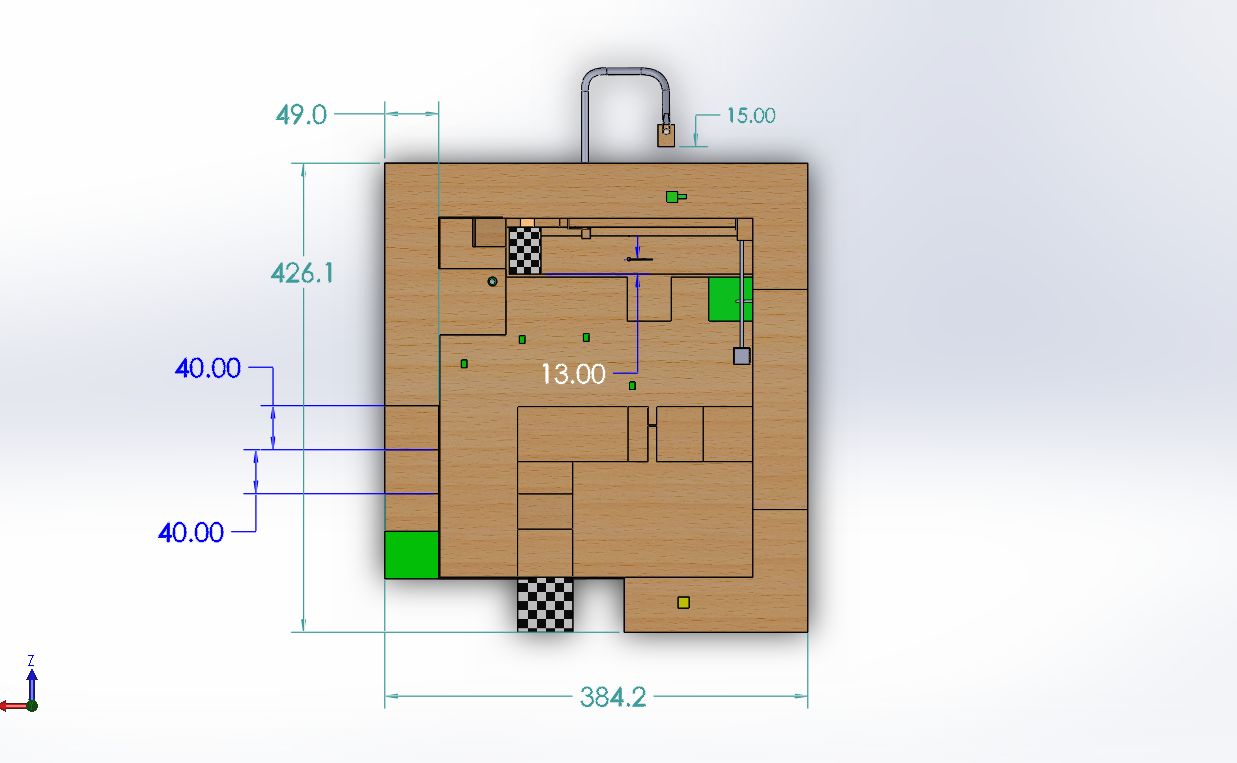
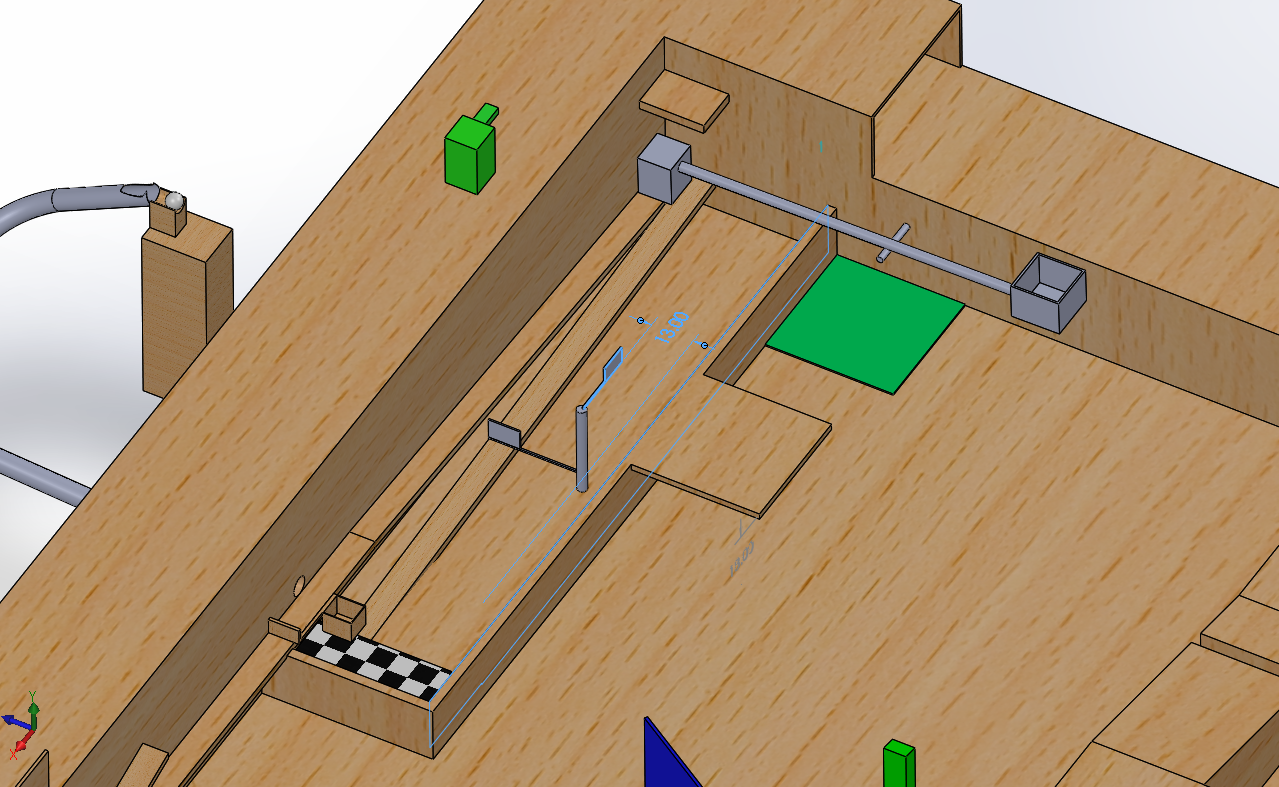
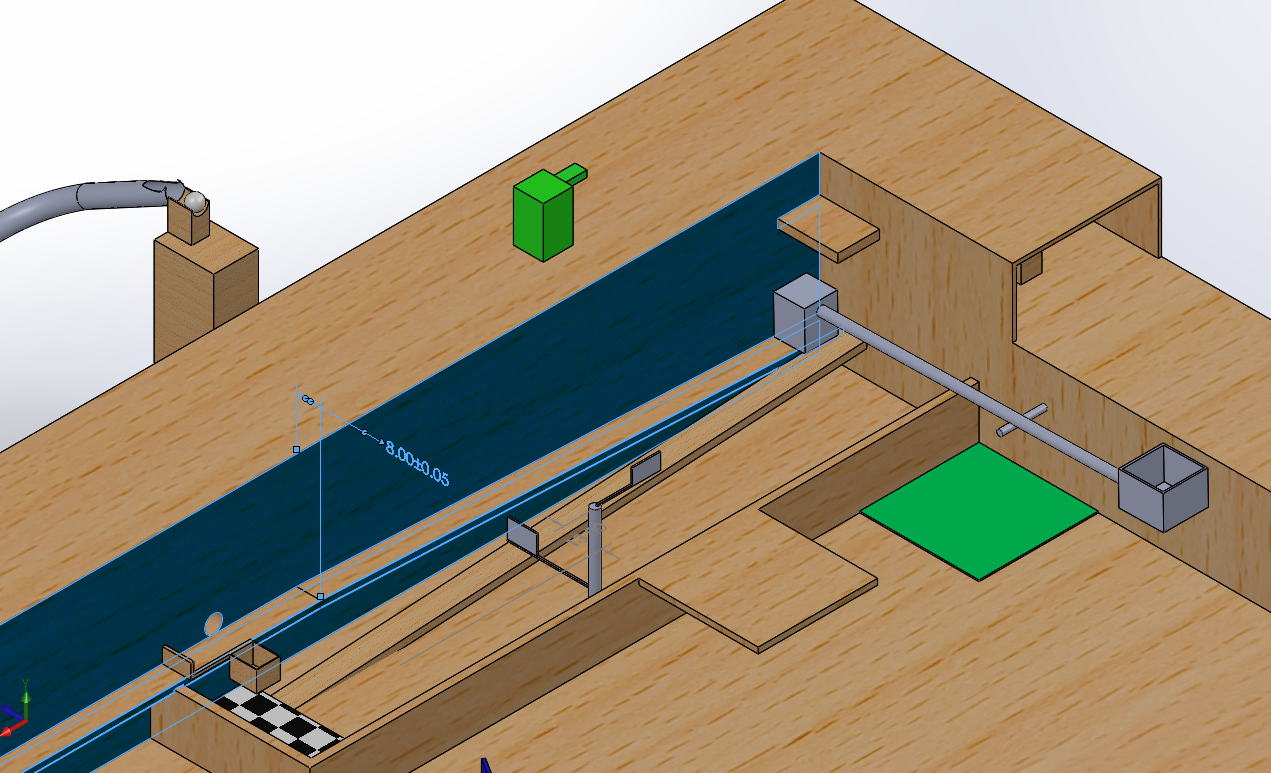
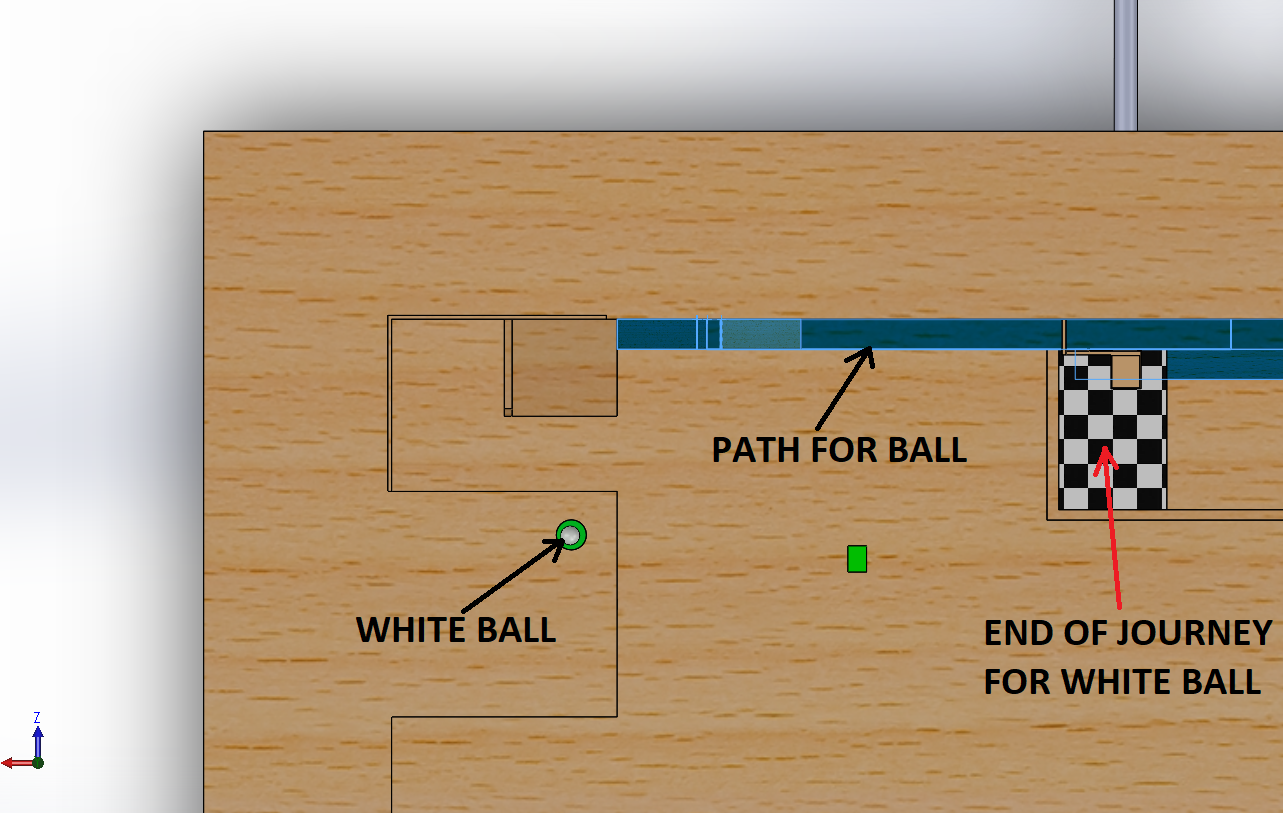
Arena (Top View)
Round 2
-
The time limit for this round is 6 minutes.
-
The bot has to start from the starting block–green colored area at the bottom left in the arena diagram.
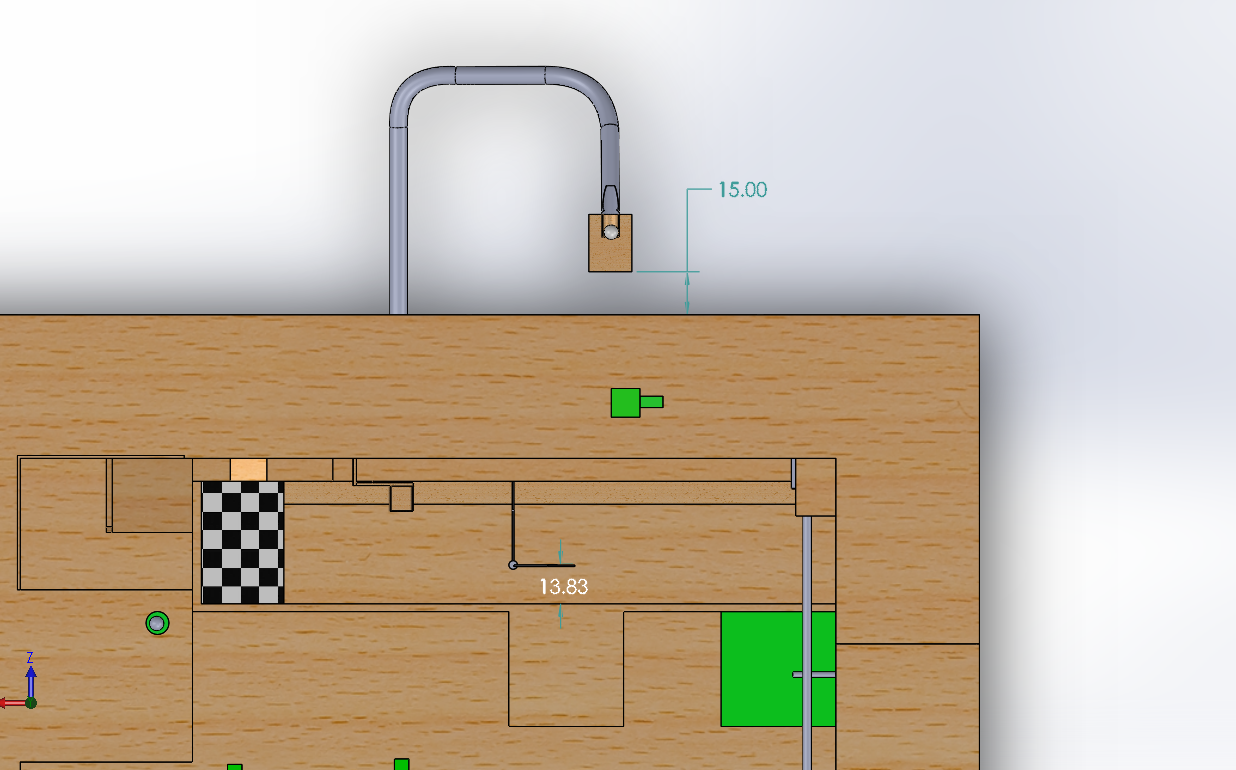
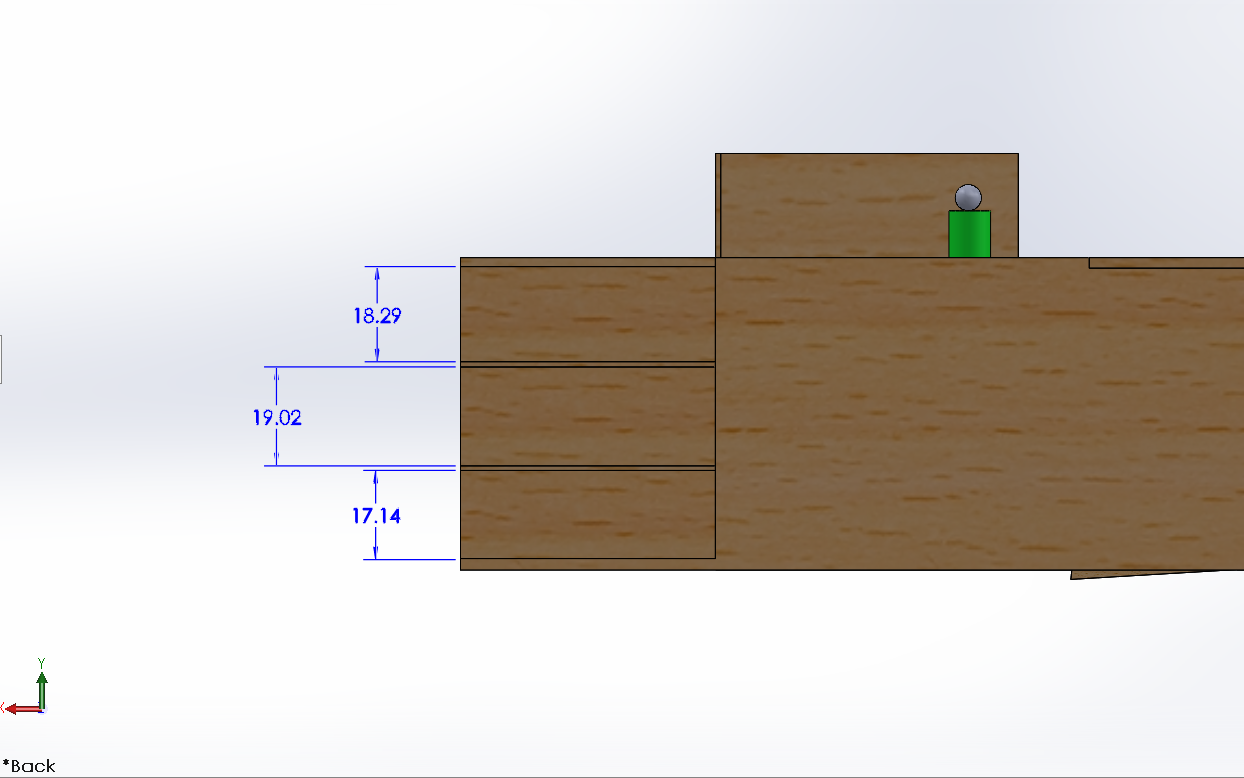
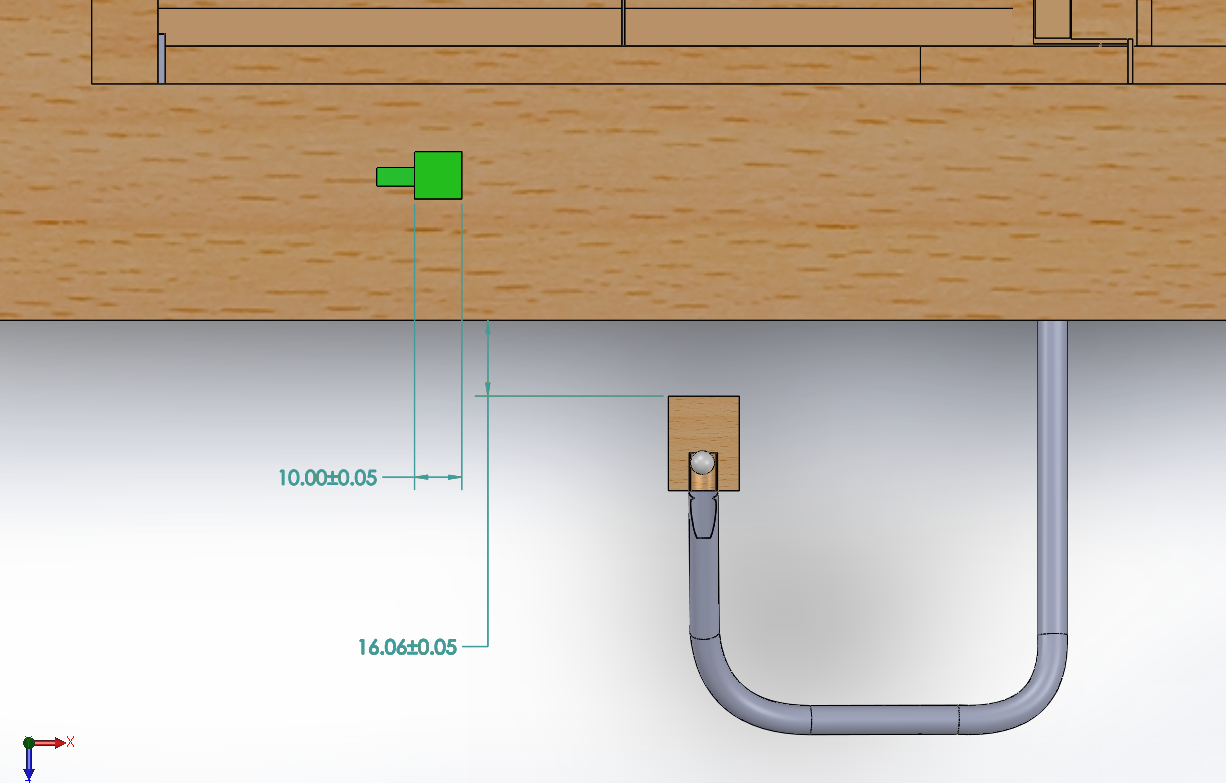
- It then has to use a suitable mechanism to shift itself up, i.e. mount three elevated platforms to the platform, go along the way on top to get to the white ball, kept on top of the small green cylindrical block on a platform jutting off from the main path, as shown.
- The bot then has to pick up the ball and then drop it on the tilted surface beside it, thus initiating the journey of the ball.
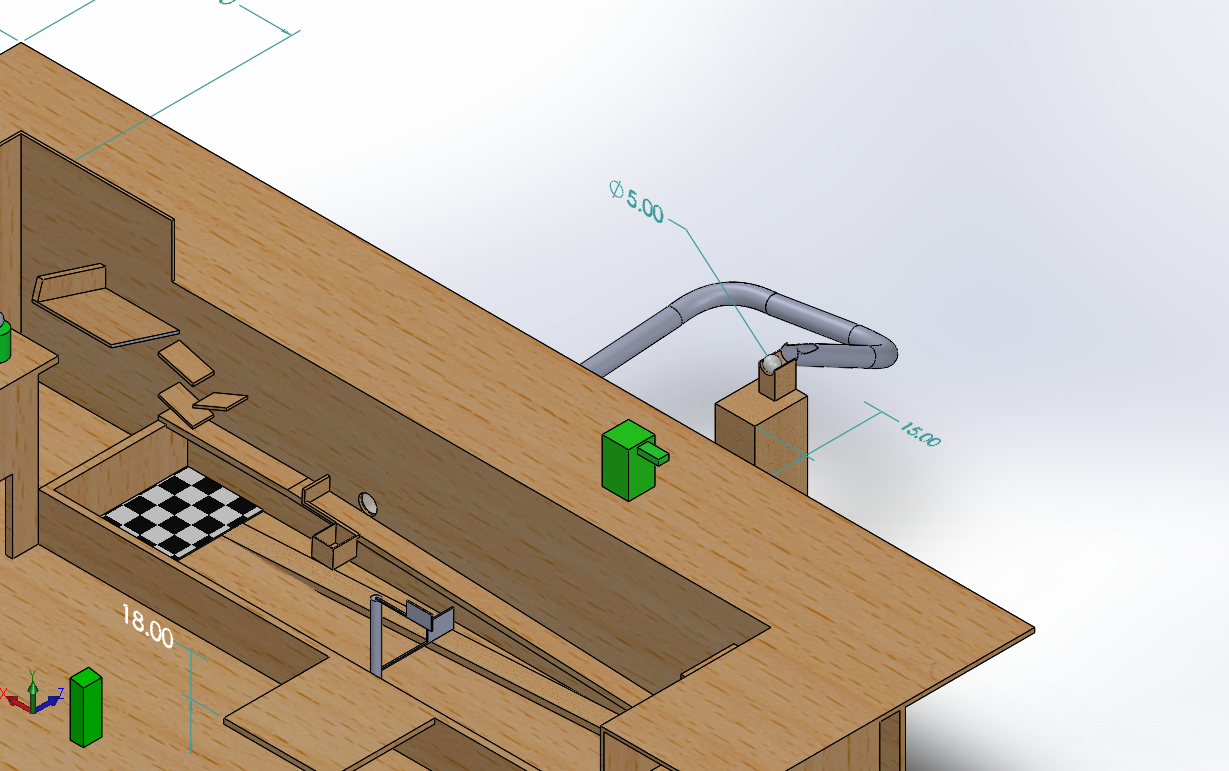
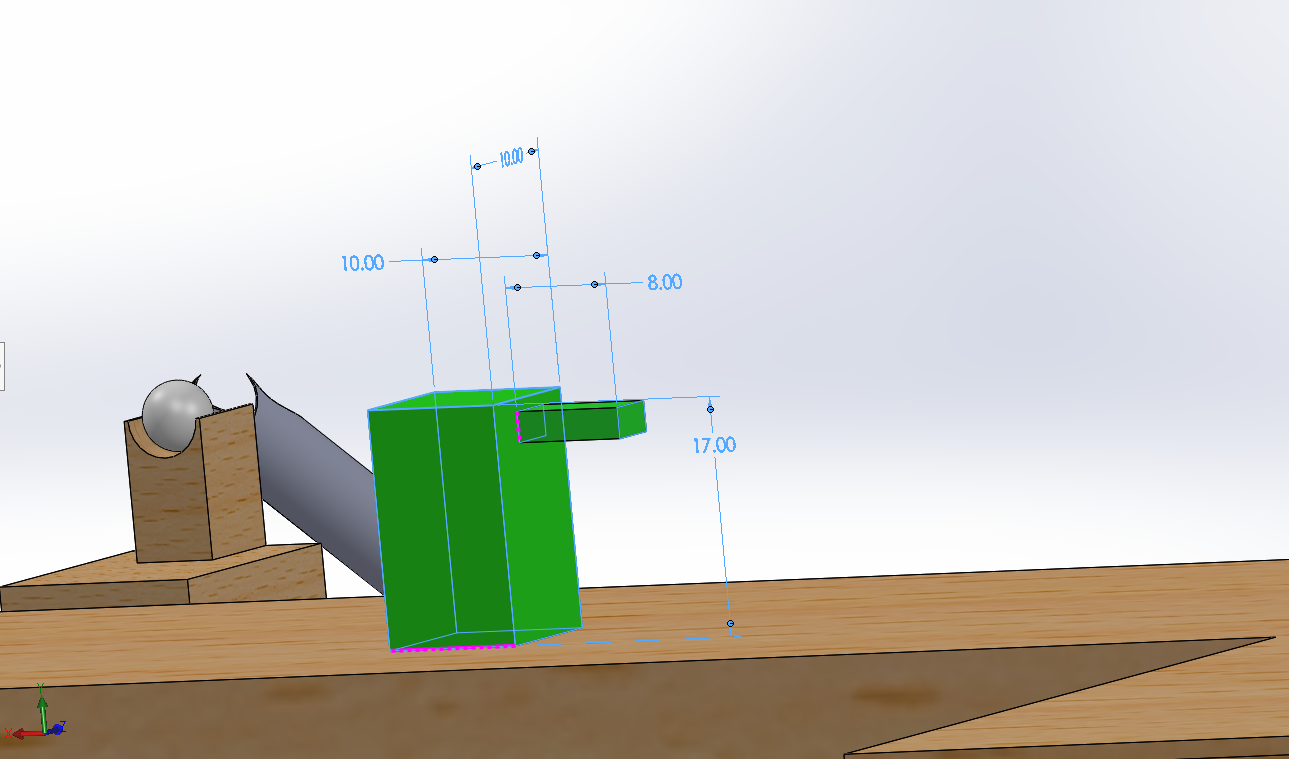
- The bot will then have to traverse along the main path so as to reach a green block with a cuboidal extruded protrusion.
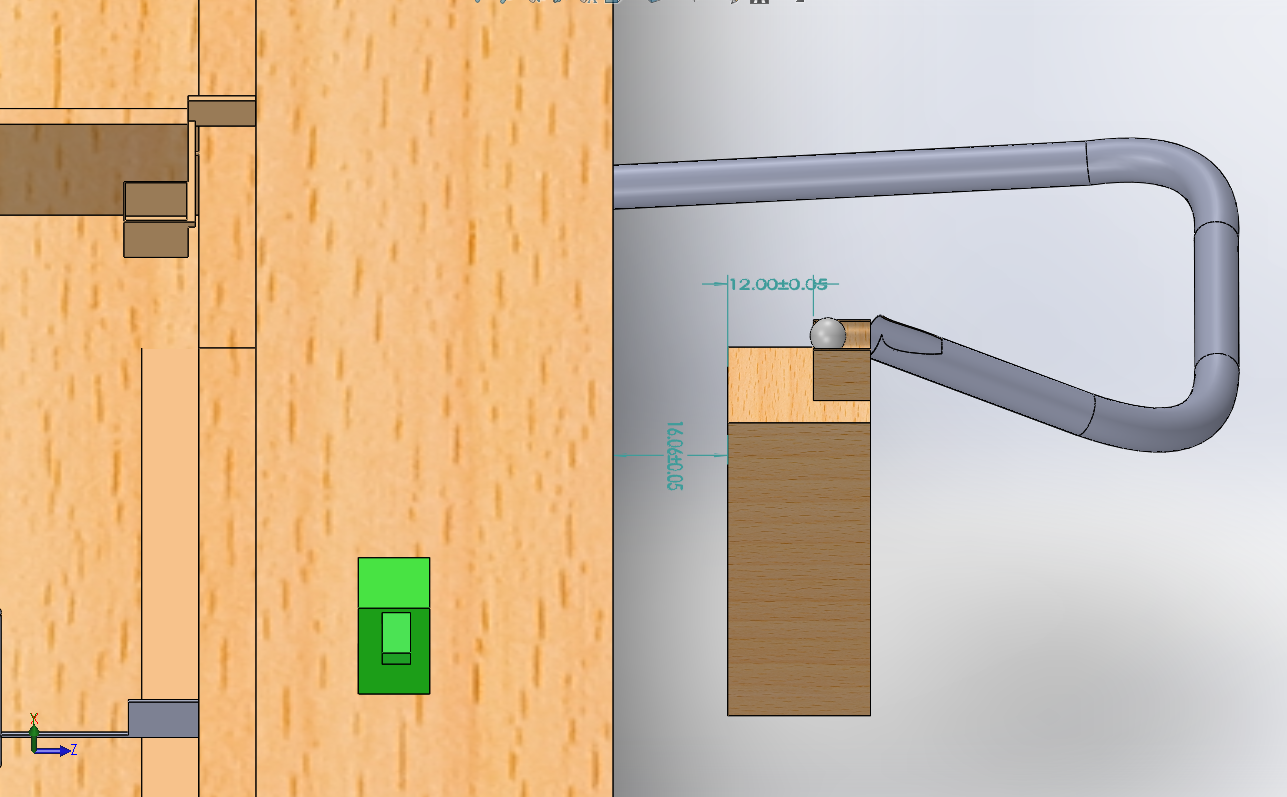
- The bot will have to grip the block and place it on the surface beside it such that the extruded protrusion faces the white ball present on that surface. Then bot needs to push the block with the extended gripper so that the white ball travels down through the pipe thus removing the obstacle out of its way.
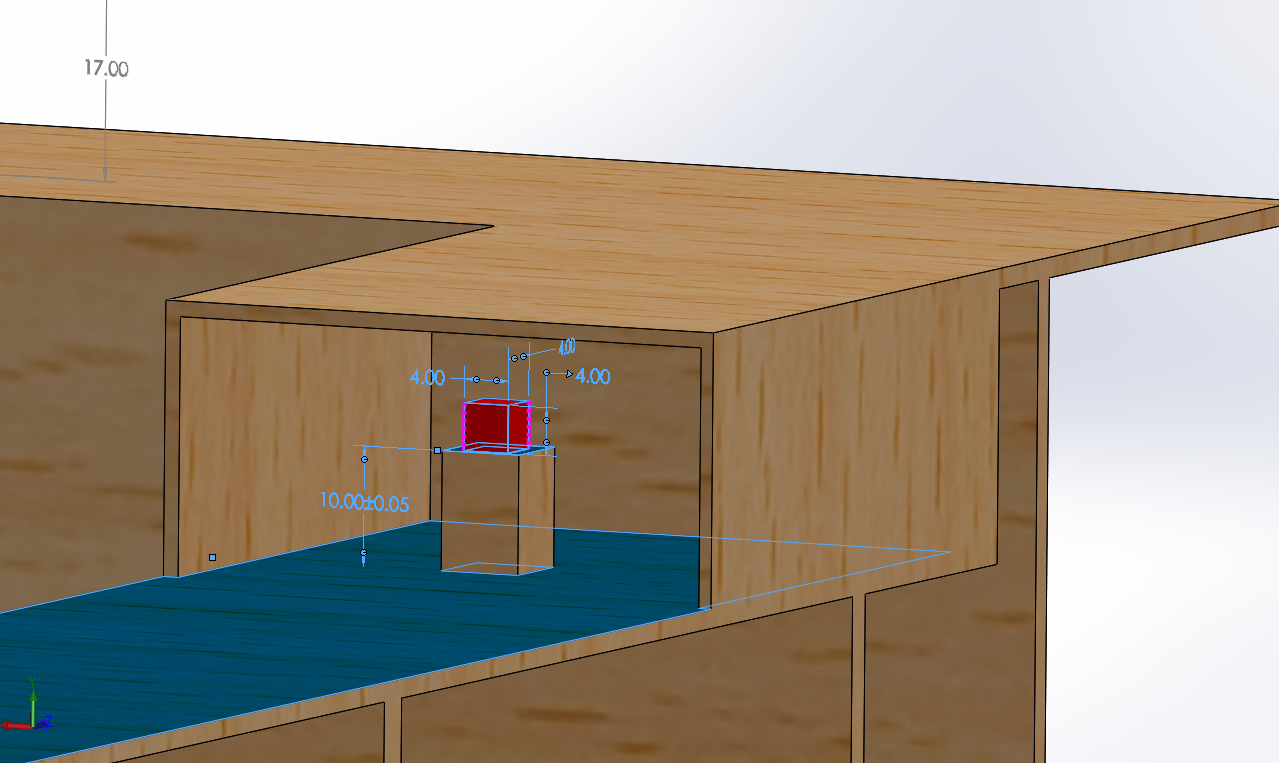
- Then further traversing along the path the bot needs to climb down the stage. After that, there is a red cube on a small podium which the bot needs to pick up drop it at the next off on the next podium under the next stage.
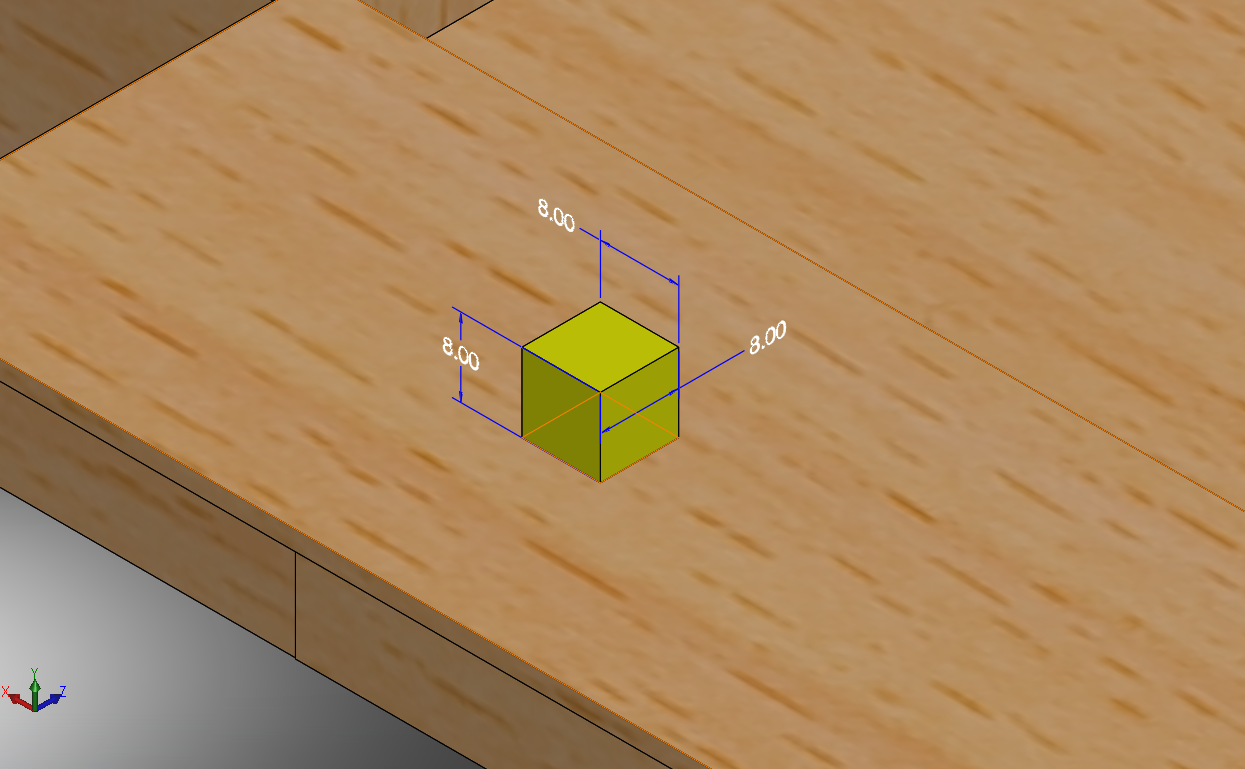
- Further, the bot needs to get the yellow block into the cubical vessel of the seesaw so as to lift up the obstacle on the path of the white ball which was initiated at the beginning of the second round.
- Thus, when the white ball reaches the checked area, it signs off the completion of the second round.
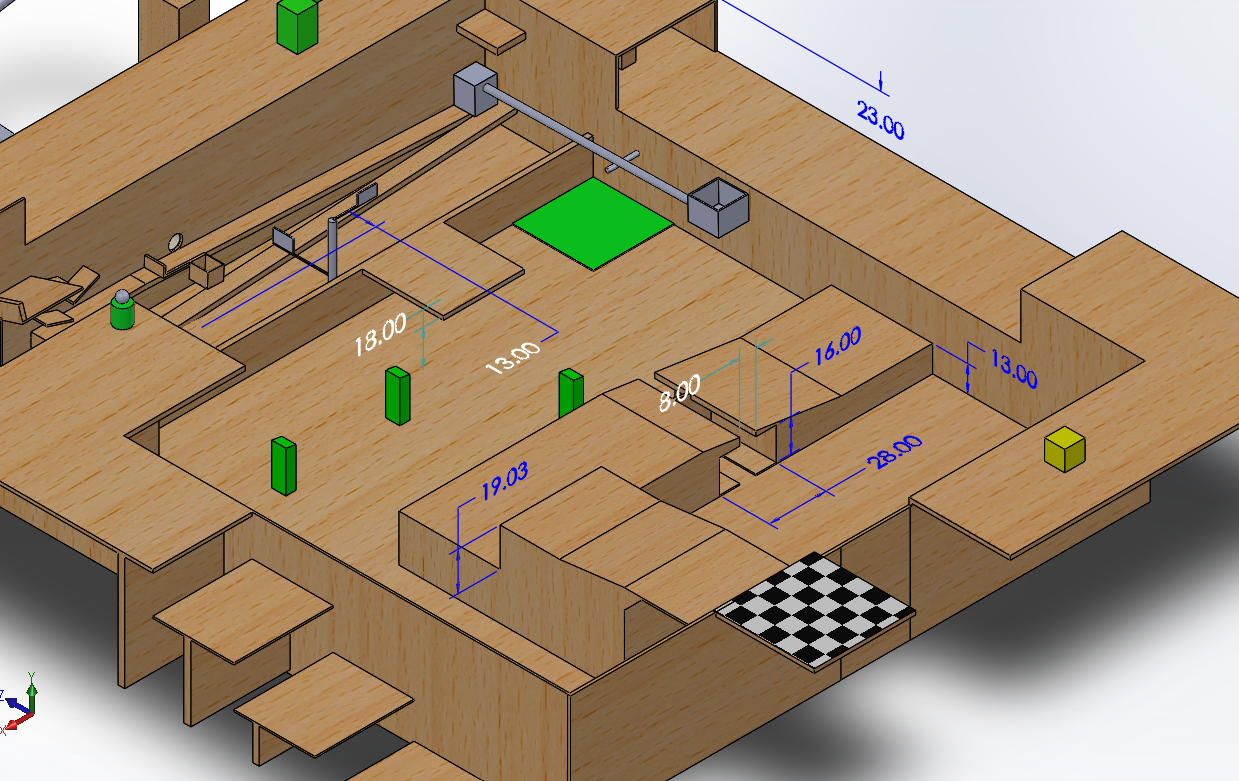
Different Views of Arena
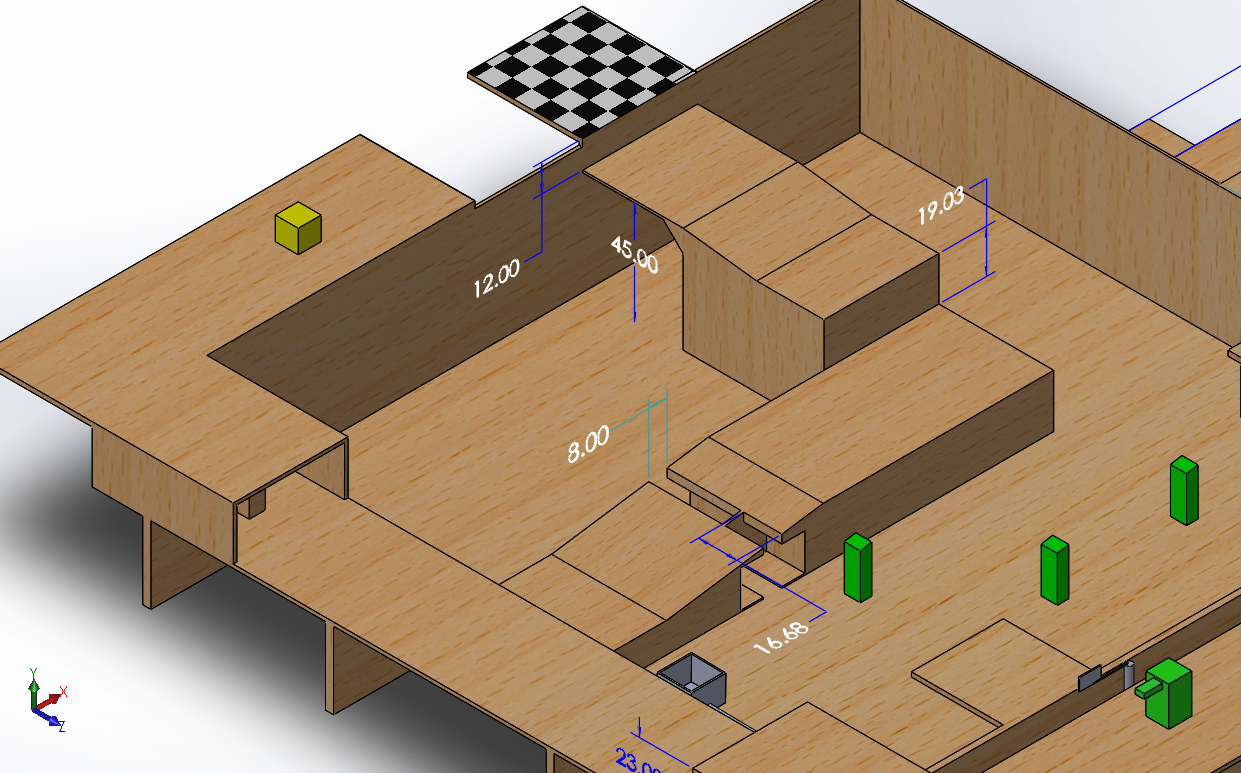

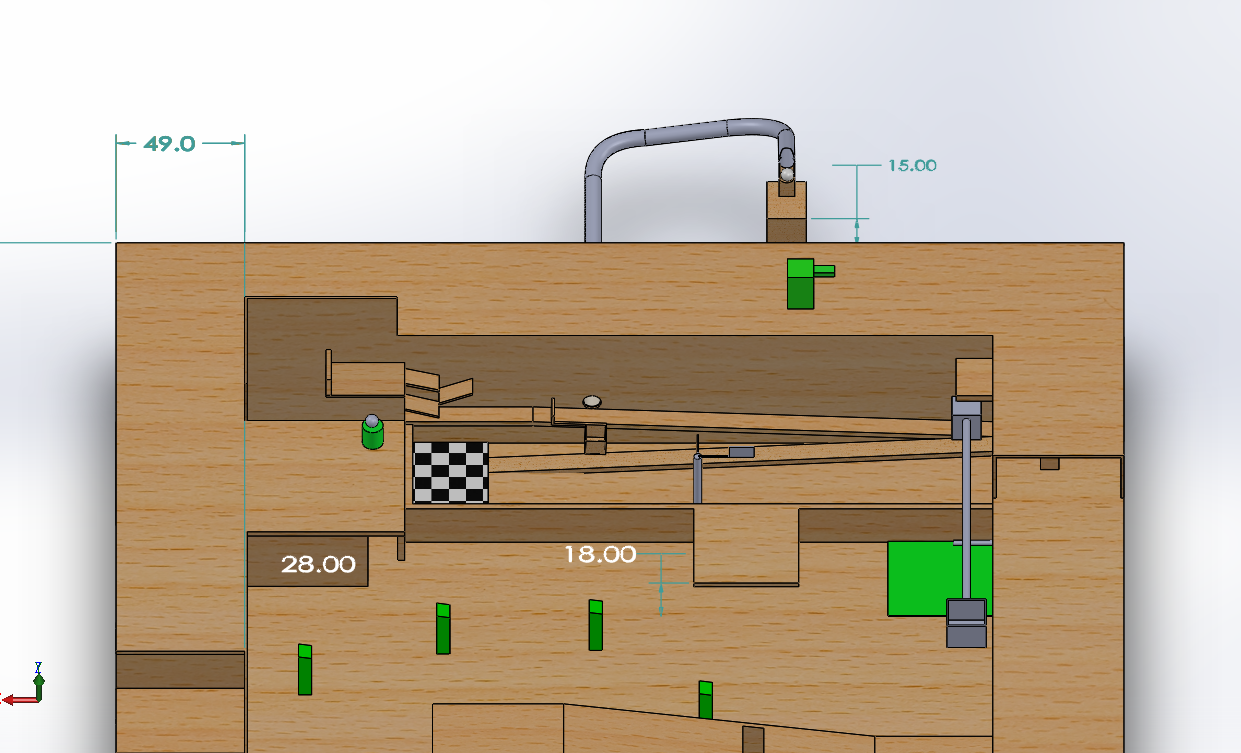
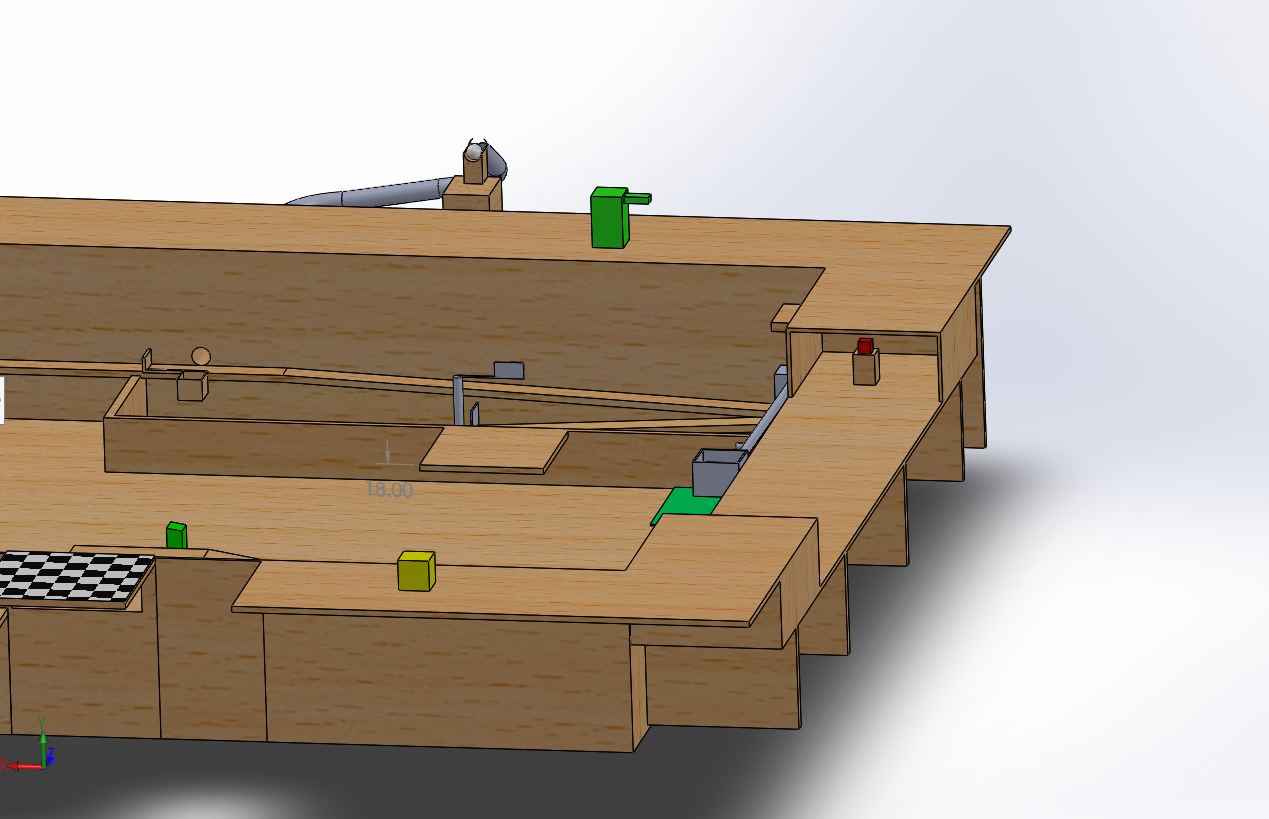
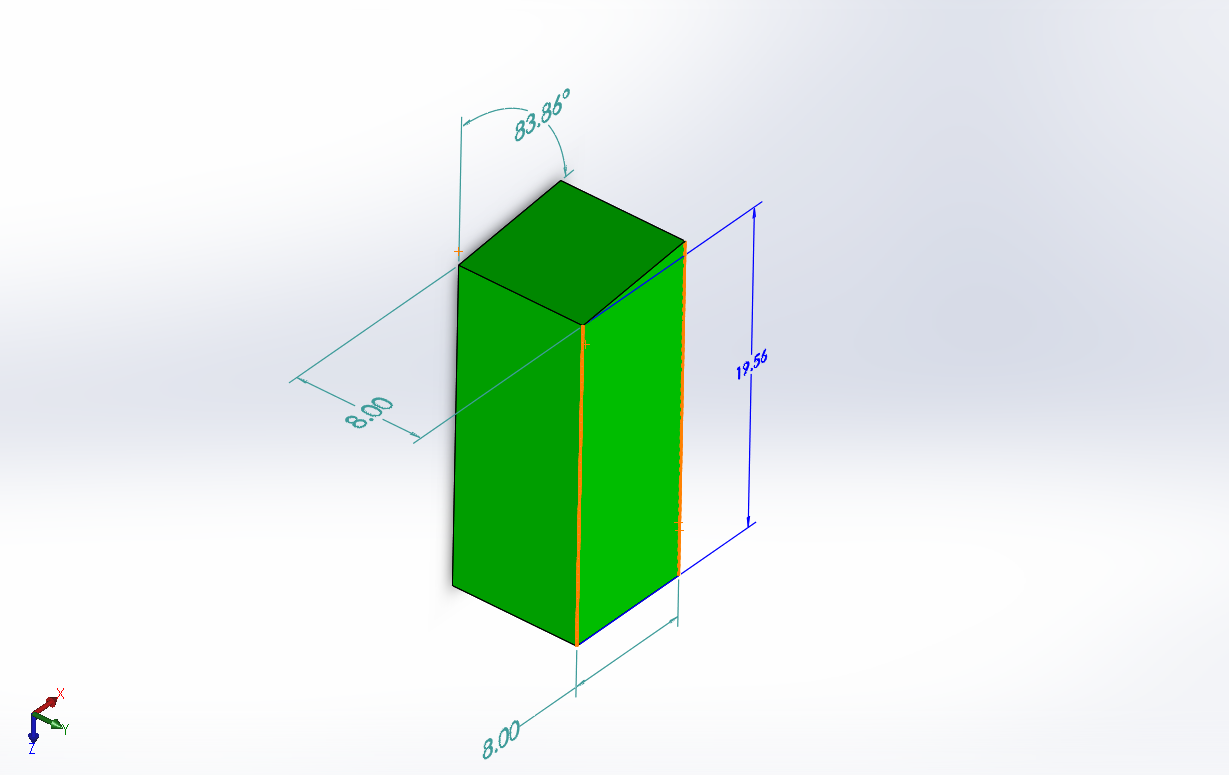
Note All the above dimensions are in cm.
Scoring
Round 1
Positives
-
Base score: 500
-
Successfully rotating the flag: 100 (RO1)
-
Taking out the green trapezoidal blocks from the enclosure: 50 per block (B)
-
Successfully filling the gap with the green blocks: 100 per block (CD)
-
Successfully crossing over the gap after placing the green blocks: 200 (G)
-
Successful plane shifting (Plane at a height greater than 18 cm): 150 per shift (P1)
-
Successful plane shifting (Plane at a height less than 18 cm): 100 per shift (P2)
-
Time bonus: number of seconds left(t’) x 3
Negatives
-
Disbalance or slipping of the robot: -50 (E1)
-
Falling off the arena or in any of the gaps: -100 (E2)
-
Unsuccessful attempt at shifting the plane : -100 (E3)
-
Tumbling of block : -50 (E4)
-
Negative marks for each timeout: -100 (T)
-
Negative marks for restart: -200 (R)
-
Negative marks for restart: -200 (R)
-
Participants are allowed to skip some parts of the arena if they want to. If X is the sum of the positives that the participant would have received had their bot successfully cleared the respective parts, twice that will be the negatives penalized for skipping (-2 * X)
-
No time bonus will be awarded if a participant decides to skip any part of the arena.
Scoring formula:
500 + RO1 * 100 + CD * 100 + B * 50 + G * 200 + P1 * 150 + P2 * 100 + t’ * 3 - E1 * 50 - E2 * 100 - E3 * 100 - E4 * 50 - T * 100 - R * 200 - 2 * X Round 2
Positives
-
Base score: 500
-
Successfully initiating the white ball on its path: 100 (WB)
-
Taking the yellow block to the seesaw: 100 (SS)
-
Successfully switch the position red block from one end to other of the podium: 300 (Q)
-
Time bonus: number of seconds left(t’) * 3
-
Initiated white ball successfully reaches the end: 300 (BB)
Negatives
-
Disbalance or slipping of the robot: -50 (E1)
-
Falling off the arena: -100 (E2)
-
Tumbling of block : -50 (E3)
-
Negative marks for each timeout: -100 (T)
-
Negative marks for restart: -200 (R)
-
Participants are allowed to skip some parts of the arena if they want to. If X is the sum of the positives that the participant would have received had their bot successfully cleared the respective parts, twice that will be the negatives penalized for skipping (-2 * X)
-
Negative marks for each timeout: -100 (T)
-
Negative marks for restart: -200 ( R )
-
Participants are allowed to skip some parts of the arena if they want to. If X is the sum of the positives that the participant would have received had their bot successfully cleared the respective parts, twice that will be the negatives penalised for skipping (-2 * X)
-
No time bonus will be awarded if a participant decides to skip any part of the arena.
Scoring formula:
500 + WB * 100 + SS * 100 + Q * 300 + P * 50 + t’ * 3 - E1 * 50 - E2 * 100 - E3 * 50 - T * 100 - R * 200 - 2 * X Contacts
Jaydeep Godbole
Email: jgodbole7@gmail.com
Ph. no: +91 8390888597
Shreyansh Vats
Email: shreyanshvts@gmail.com
Ph. no: +91 7024156777